
Page 381 - Electronic Mechanic - TP - Volume - 2
P. 381
ELECTRONICS MECHANIC - CITS
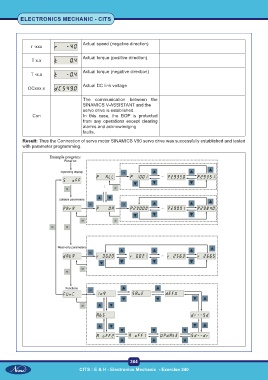
Actual speed (negative direction)
r -xxx
Actual torque (positive direction)
T x.x
Actual torque (negative direction)
T -x.x
Actual DC link voltage
DCxxx.x
The communication between the
SINAMICS V-ASSISTANT and the
servo drive is established.
Con In this case, the BOP is protected
from any operations except clearing
alarms and acknowledging
faults.
Result: Thus the Connection of servo motor SINAMICS V90 servo drive was successfully established and tested
with parameter programming.
364
CITS : E & H - Electronics Mechanic - Exercise 240