
Page 344 - Electronic Mechanic - TP - Volume - 2
P. 344
ELECTRONICS MECHANIC - CITS
8 9 10 11 12 13 14 15 16
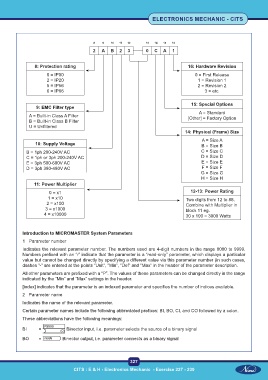
2 A B 2 3 0 C A 1
8: Protection rating 16: Hardware Revision
0 = IP00 0 = First Release
2 = IP20 1 = Revision 1
5 = IP56 2 = Revision 2
6 = IP66 3 = etc.
15: Special Options
9: EMC Filter type
A = Standard
A = Built-in Class A Filter [Other] = Factory Option
B = Built-in Class B Filter
U = Unfiltered
14: Physical (Frame) Size
A = Size A
10: Supply Voltage B = Size B
B = 1ph 200-240V AC C = Size C
C = 1ph or 3ph 200-240V AC D = Size D
E = 3ph 500-600V AC E = Size E
D = 3ph 380-480V AC F = Size F
G = Size G
H = Size H
11: Power Multiplier
0 = x1 12-13: Power Rating
1 = x10 Two digits from 12 to 88.
2 = x100 Combine with Multiplier in
3 = x1000 block 11 eg.
4 = x10000 30 x 100 = 3000 Watts
Introduction to MICROMASTER System Parameters
1 Parameter number
Indicates the relevant parameter number. The numbers used are 4-digit numbers in the range 0000 to 9999.
Numbers prefixed with an “r” indicate that the parameter is a “read-only” parameter, which displays a particular
value but cannot be changed directly by specifying a different value via this parameter number (in such cases,
dashes “-“ are entered at the points “Unit”, “Min”, “Def” and “Max” in the header of the parameter description.
All other parameters are prefixed with a “P”. The values of these parameters can be changed directly in the range
indicated by the “Min” and “Max” settings in the header.
[index] indicates that the parameter is an indexed parameter and specifies the number of indices available.
2 Parameter name
Indicates the name of the relevant parameter.
Certain parameter names include the following abbreviated prefixes: BI, BO, CI, and CO followed by a colon.
These abbreviations have the following meanings:
BI = Binector input, i.e. parameter selects the source of a binary signal
BO = Binector output, i.e. parameter connects as a binary signal
327
CITS : E & H - Electronics Mechanic - Exercise 227 - 230