
Page 348 - Electronic Mechanic - TP - Volume - 2
P. 348
ELECTRONICS MECHANIC - CITS
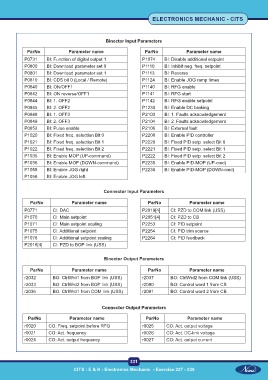
Binector Input Parameters
ParNo Parameter name ParNo Parameter name
P0731 BI: Function of digital output 1 P1074 BI: Disable additional setpoint
P0800 BI: Download parameter set 0 P1110 BI: Inhibit neg. freq. setpoint
P0801 BI: Download parameter set 1 P1113 BI: Reverse
P0810 BI: CDS bit 0 (Local / Remote) P1124 BI: Enable JOG ramp times
P0840 BI: ON/OFF1 P1140 BI: RFG enable
P0842 BI: ON reverse/OFF1 P1141 BI: RFG start
P0844 BI: 1. OFF2 P1142 BI: RFG enable setpoint
P0845 BI: 2. OFF2 P1230 BI: Enable DC braking
P0848 BI: 1. OFF3 P2103 BI: 1. Faults acknowledgement
P0849 BI: 2. OFF3 P2104 BI: 2. Faults acknowledgement
P0852 BI: Pulse enable P2106 BI: External fault
P1020 BI: Fixed freq. selection Bit 0 P2200 BI: Enable PID controller
P1021 BI: Fixed freq. selection Bit 1 P2220 BI: Fixed PID setp. select Bit 0
P1022 BI: Fixed freq. selection Bit 2 P2221 BI: Fixed PID setp. select Bit 1
P1035 BI: Enable MOP (UP-command) P2222 BI: Fixed PID setp. select Bit 2
P1036 BI: Enable MOP (DOWN-command) P2235 BI: Enable PID-MOP (UP-cmd)
P1055 BI: Enable JOG right P2236 BI: Enable PID-MOP (DOWN-cmd)
P1056 BI: Enable JOG left
Connector Input Parameters
ParNo Parameter name ParNo Parameter name
P0771 CI: DAC P2019[4] CI: PZD to COM link (USS)
P1070 CI: Main setpoint P2051[4] CI: PZD to CB
P1071 CI: Main setpoint scaling P2253 CI: PID setpoint
P1075 CI: Additional setpoint P2254 CI: PID trim source
P1076 CI: Additional setpoint scaling P2264 CI: PID feedback
P2016[4] CI: PZD to BOP link (USS)
Binector Output Parameters
ParNo Parameter name ParNo Parameter name
r2032 BO: CtrlWrd1 from BOP link (USS) r2037 BO: CtrlWrd2 from COM link (USS)
r2033 BO: CtrlWrd2 from BOP link (USS) r2090 BO: Control word 1 from CB
r2036 BO: CtrlWrd1 from COM link (USS) r2091 BO: Control word 2 from CB
Connector Output Parameters
ParNo Parameter name ParNo Parameter name
r0020 CO: Freq. setpoint before RFG r0025 CO: Act. output voltage
r0021 CO: Act. frequency r0026 CO: Act. DC-link voltage
r0024 CO: Act. output frequency r0027 CO: Act. output current
331
CITS : E & H - Electronics Mechanic - Exercise 227 - 230