
Page 251 - CITS - Welder - TT - Hindi
P. 251
वे र - CITS
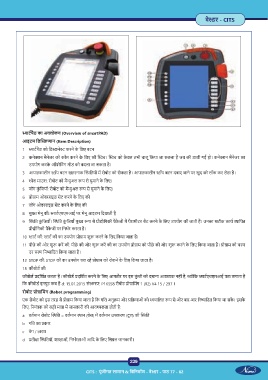
ाट पैड का अवलोकन (Overview of smartPAD)
आइटम िड शन (Item Description)
1 ाट पैड को िड ने करने के िलए बटन
2 कने न मैनेजर को कॉल करने के िलए की च। च को के वल तभी चालू िकया जा सकता है जब की डाली गई हो। कने न मैनेजर का
उपयोग करके ऑपरेिटंग मोड को बदला जा सकता है।
3 आपातकालीन ॉप बटन खतरनाक थितयों म रोबोट को रोकता है। आपातकालीन ॉप बटन दबाए जाने पर खुद को लॉक कर लेता है।
4 ेस माउस: रोबोट को मै ुअल प से घुमाने के िलए।
5 जॉग कुं िजयाँ: रोबोट को मै ुअल प से घुमाने के िलए।
6 ो ाम ओवरराइड सेट करने के िलए की
7 जॉग ओवरराइड सेट करने के िलए की
8 मु मेनू की: ाट एचएमआई पर मेनू आइटम िदखाती है
9 थित कुं िजयाँ। थित कुं िजयाँ मु प से ौ ोिगकी पैके जों म पैरामीटर सेट करने के िलए उपयोग की जाती ह । उनका सटीक काय थािपत
ौ ोिगकी पैके जों पर िनभ र करता है।
10 ाट की: ाट की का उपयोग ो ाम शु करने के िलए िकया जाता है।
11 पीछे की ओर शु कर की: पीछे की ओर शु कर की का उपयोग ो ाम को पीछे की ओर शु करने के िलए िकया जाता है। ो ाम को चरण
दर चरण िन ािदत िकया जाता है।
12 STOP की: STOP की का उपयोग चल रहे ो ाम को रोकने के िलए िकया जाता है।
13 कीबोड की
कीबोड दिश त करता है। कीबोड दिश त करने के िलए आमतौर पर इस कुं जी को दबाना आव क नहीं है, ों िक ाट एचएमआई पता लगाता है
िक कीबोड इनपुट कब है d: 15.01.2015 सं रण: P1KSS8 रोबोट ो ािमंग 1 (R2) V4 15 / 297 1
रोबोट ो ािमंग (Robot programming)
एक रोबोट को इस तरह से ो ाम िकया जाता है िक गित अनु म और ि याओं को चािलत प से और बार-बार िन ािदत िकया जा सके । इसके
िलए, िनयं क को बड़ी मा ा म जानकारी की आव कता होती है:
a वत मान रोबोट थित = वत मान थान (बेस) म वत मान उपकरण (टू ल) की थित
b गित का कार
c वेग / रण
d ती ा थितयों, शाखाओं, िनभ रताओं आिद के िलए िस ल जानकारी।
239
CITS : पूंजीगत सामान & िविनमा ण - वे र - पाठ 77 - 82